Depth Map and Normal Direction Fusion
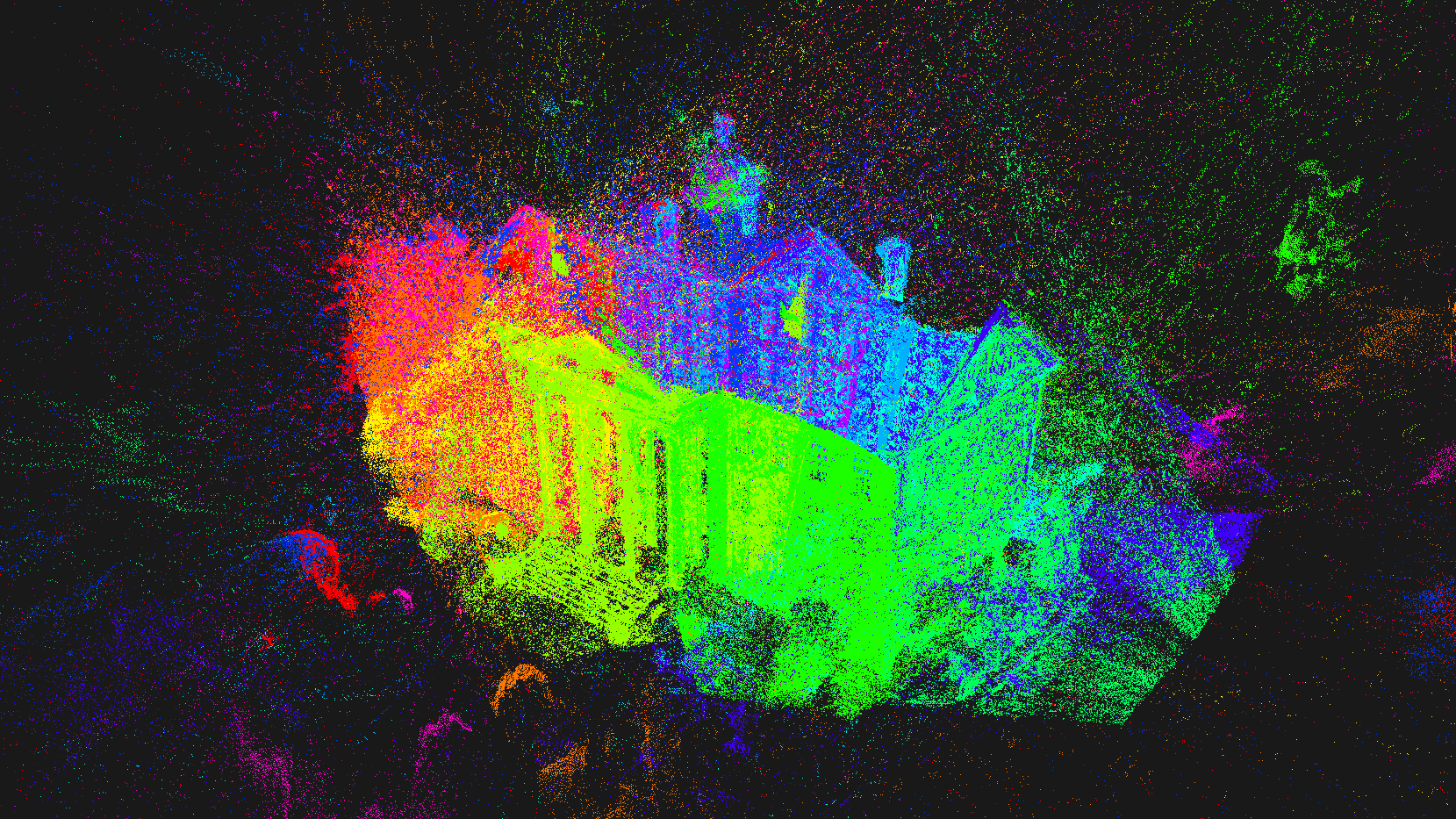
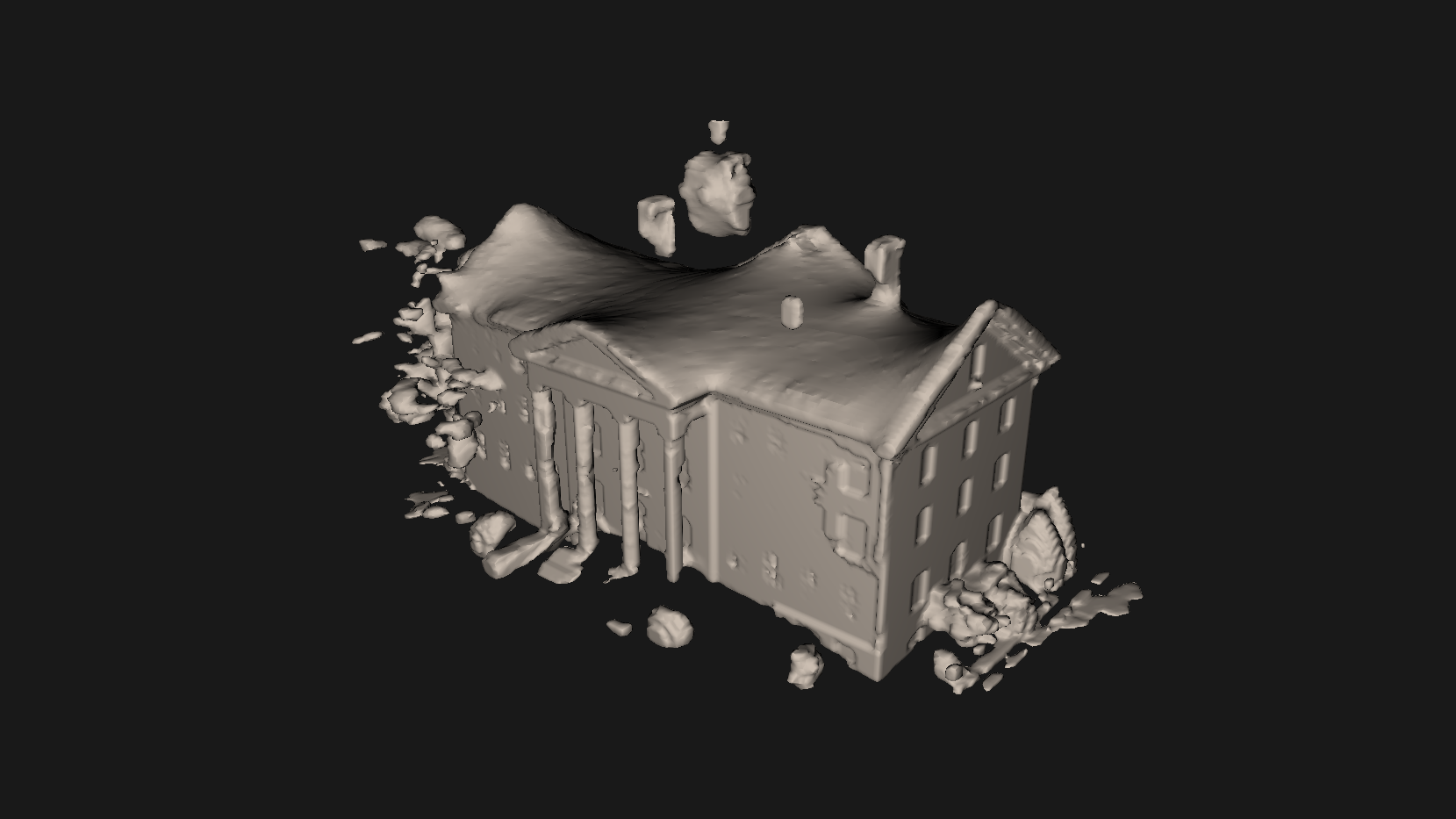
For the 3D Vision course during master studies at ETH, I've worked on the problem of depth map fusion, where a 3D model is assembled given many coarse and noisy depth images of that model taken with a real camera.
For our project, we've extended the baseline methods of depth map fusion described in Fast and High Quality Fusion of Depth Maps by Zach et al. (2008) by including the surface normal estimation. These normal maps which correspond to the depth images were obtained using a deep learning-based classifier.
The fusion method is implemented on the GPU using CUDA and is based on the Primal-Dual algorithm for energy minimization with total variation regularization.
The final result gave us a slightly better mesh compared to the baseline methods. The project was realized in a team of three.
References & Further Reading
- D. Vicini, N. Bartolovic and D. Keyes. Depth map and normal direction fusion. ETH Zurich, 3D Vision course. 2016.
- C. Zach. Fast and high quality fusion of depth maps. Proceedings of the international symposium on 3D data processing, visualization and transmission (3DPVT). Vol. 1. No. 2. 2008.